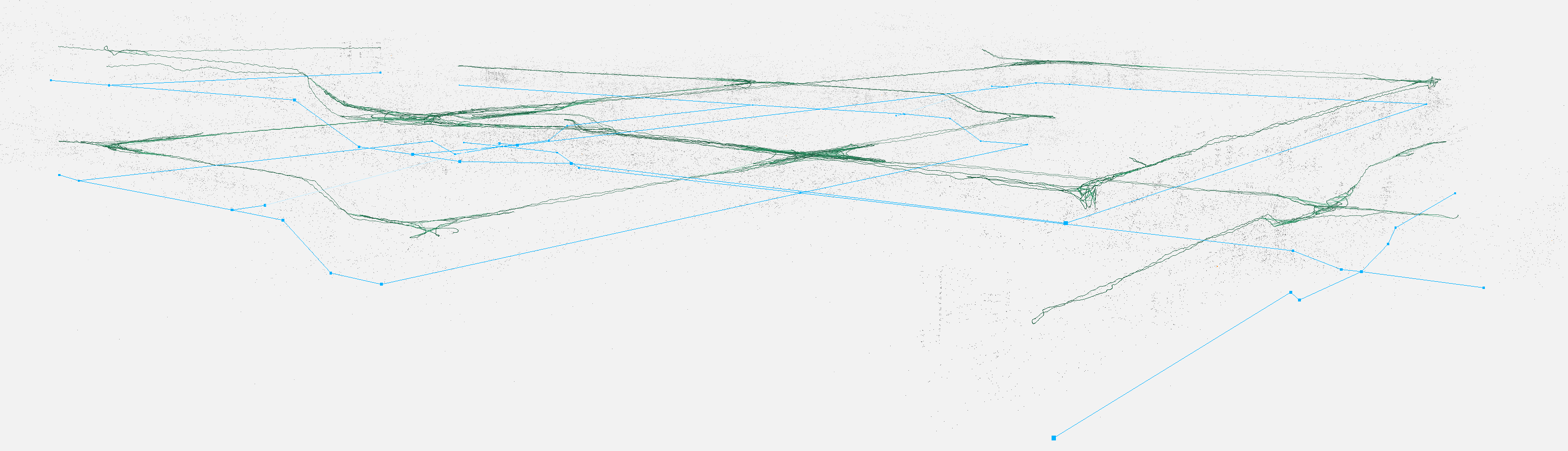
Der Kern von finder ist ein eigener SLAM (Simultaneous Localization and Mapping) Algorithmus zur 3D-Rekonstruktion von Umgebungen aus Videos und zur Bestimmung der eigenen Position innerhalb dieser Umgebungen.
Unser einzigartiger Algorithmus hat eine besondere Kombination von Eigenschaften, die finder seine bereits aufgezeigten Alleinstellungsmerkmale verleihen:
- Echtzeit-Fähigkeit auf Smartphones
- Rekonstruktionsgröße bis zu Gebäudekomplexen
- Streaming von Navigationsdaten
Sowohl die Erstellung der Karten für die Navigation als auch die Positionsbestimmung basieren hauptsächlich auf den Kamera-Daten des Smartphones.
Unter folgenden Umgebungsbedingungen funktioniert finder besonders gut:






Herausforderungen stellen dar:



* in diesem Fall kann der neu gestaltete Bereich der Umgebung neu erfasst und aktualisiert werden
Sieht es an Ihrem Standort gut aus? Wunderbar! Wir benachrichtigen Sie gerne sobald finder zur Verfügung steht.
Falls Sie sich nicht ganz sicher sind, dann probieren Sie finder doch einfach aus sobald es online geht!
Haben Sie das Gefühl, dass die Einrichtung bei Ihnen herausfordernder werden könnte? Dann nehmen Sie Kontakt mit uns auf, wir helfen gerne bei der Lösungsfindung!